

Energiahatékony, alacsony profilú elektronikus sebességszabályozó tervezése
A WARR Space Robotics a Müncheni Műszaki Egyetem (TU Munich) robotikáért rajongó interdiszciplináris csapata. Az űrrobotikai csapat projektjei közös célt szolgálnak: Autonóm robottechnológiák kifejlesztése a jövőbeli emberi űrkutatási küldetések kockázatmentesítésére.
Csapatunk jelentős mérföldkőhöz érkezett egy elektronikus sebességszabályozó (ESC) prototípusának sikeres megalkotásával. Ez a roverünk kerekeinek hajtóereje, amelyhez kerekenként két motorvezérlőre van szükség: Az egyik hajtja a kereket, a másik pedig irányítja azt. A kereskedelmi lehetőségek felmérése után egyik elérhető megoldás sem nyújtott ilyen képességet kompakt formában. Az űrrobotikai csapat ezért úgy döntött, hogy ESC-t tervez kifejezetten rover eszközök számára.
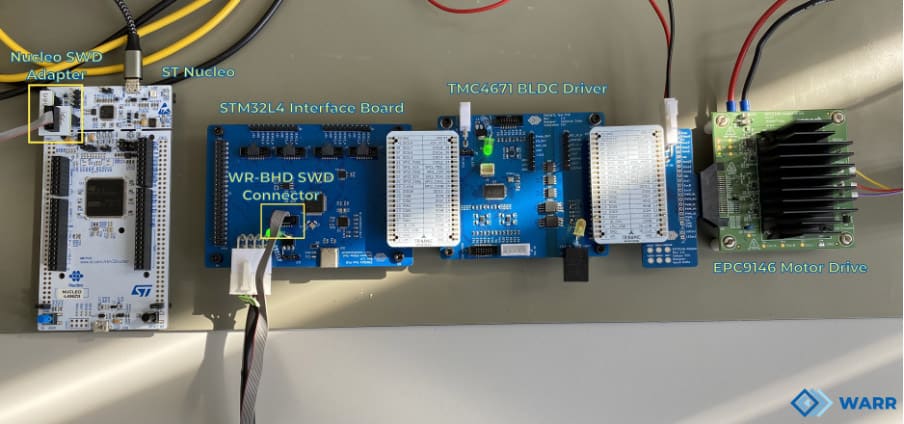
Természetesen egy ilyen összetett hardver fejlesztése egy prototípus megtervezésével és kiértékelésével kezdődött. A fenti képen látható ESC prototípus a kommunikáció megkönnyítése érdekében egy STM32L4 családba tartozó mikrokontrollert integrált. A TMC4671 BLDC-meghajtón alapuló lap a motorvezérlést teszi lehetővé.
A kompakt forma elérése érdekében az inverter tervezésénél a GaN-technológia alkalmazása mellett döntöttünk. Az EPC9146 motorhajtó lap lehetőséget nyújtott az ESC gyors kiértékelésére. A prototípus továbbá rendelkezik egy “szigetelőgáttal”, amely teljesen szétválasztja a logikai és a teljesítményfokozatokat. Ez lehetővé teszi, hogy biztonságosan használhassuk a nagyfeszültségű egyenáramú forrásokat a motorjaink meghajtásához, továbbá nagyobb energiahatékonyságot érhetünk el.
Az első validált ESC prototípus (a fenti képen látható) több kiértékelő nyomtatott áramköri lapból állt, amelyeket blokkoként kapcsoltunk össze a kívánt funkciók elérése érdekében. Ez a megközelítés lehetővé teszi az alacsony költségű iteratív tervezést, mivel minden egyes blokk önállóan lett létrehozva, tesztelve és kiértékelve, szemben egy nagyobb, integrált PCB többszöri ismétlésével.
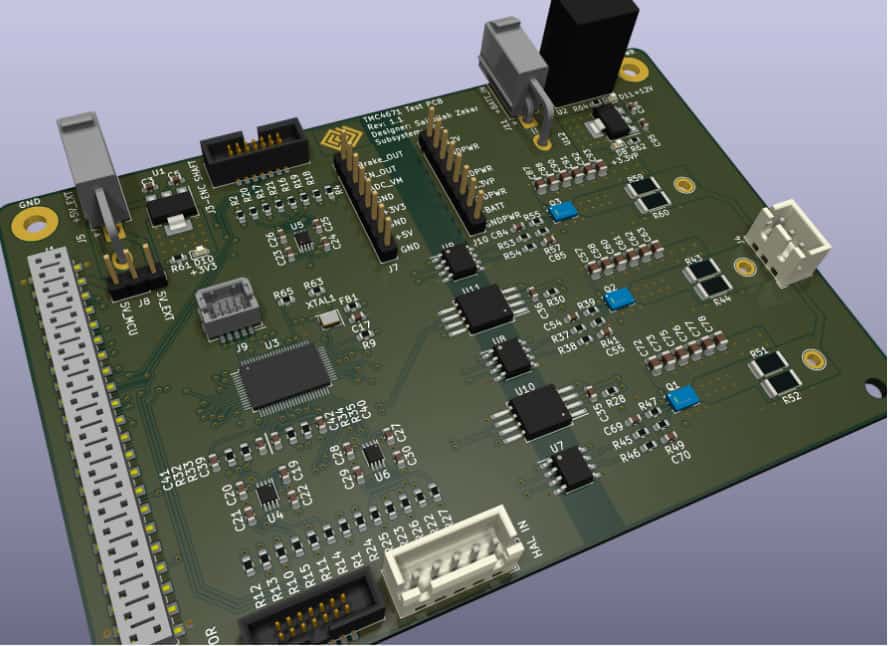
A következő lépés az említett blokkok egyetlen nyomtatott áramköri lapra történő integrálása. Ennek az iterációnak a tervezése jelenleg felülvizsgálat alatt áll, és hamarosan gyártásra kerül. Az alábbiakban látható ízelítőként a terv 3D nézete. A soronkövetkező verzió megpróbálja javítani a nyomtatott áramköri lap helykihasználtságát egy kompakt formafaktor elérése érdekében.
![]()
További információkért látogasson el a WARR Space Robotics weboldalára!
A csapat által írt eredeti, angol nyelvű blogbejegyzés az Eurocircuits.com oldalán olvasható ide kattintva.
Értesüljön legfrissebb híreinkről elsőként! Kövessen minket!










