

Két villamosmérnök és hat gépészmérnök hallgatóból álló csapatunk az ETH Zürich alapképzésének utolsó évében egy mágneses mászórobot építése érdekében dolgozik együtt.

Elképzelésünk egy mágneses lábakkal rendelkező négylábú robot megépítése, amely ipari környezetben képes acélból készült szerkezetek ellenőrzési munkálatainak elvégzésére. A jelenlegi ellenőrző robotok közül csak a drónok képesek ilyen magasságokba eljutni, ezért a magasan lévő és nagy pontosságot igénylő feladatokat továbbra is embereknek kell elvégezni. A legtöbb ilyen szerkezet mindazonáltal gyakran nehezen és veszélyesen megmászható emberi munkerő számára. Egy mászórobot azonban rendelkezik azokkal a képességekkel, amelyekkel a drónok számára megoldhatatlan feladatokat el lehet végezni. Magnecko nevű robotunkat kilenc hónap alatt sikerült megterveznünk, megépítenünk, és tesztelnünk, mellyel az ellenőrzések biztonságosabbak és hatékonyabbak lehetnek.
Az Eurocircuits segítségével többszörös iteráción keresztül tudtuk tökéletesíteni a robotunk nyomtatott áramköri lapjait.
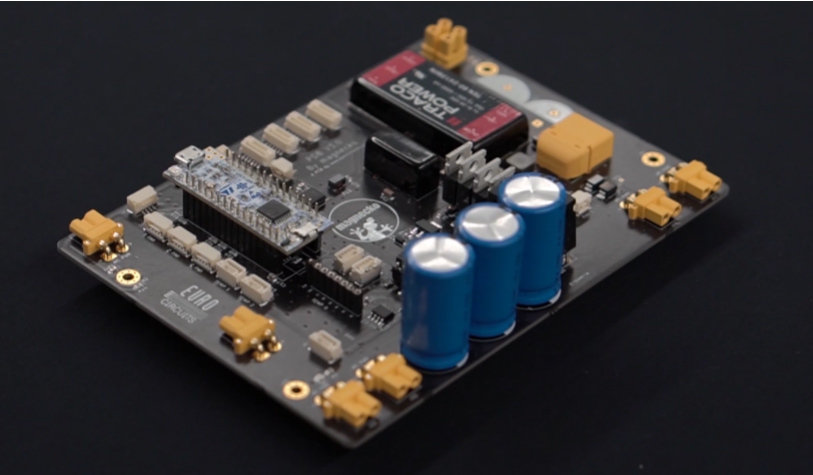
Main PCB
A teljesítmény elosztásához és a motorok áramerősségének elektromos vezérléséhez úgy döntöttünk, hogy saját nyomtatott áramköri lapot tervezünk, amely a test belsejében található.
A motorvezérlőink nagy kapacitív terhelése miatti bemeneti áram kezeléséhez egy hálózati kapcsolót terveztünk. Ez a nyomtatott áramköri lap alsó oldalán lévő hálózati kapcsoló képes a kondenzátorok előtöltésére és a motorok áramellátásának szabályozására. Az indítási folyamat során a kondenzátorok egy ellenálláson keresztül előtöltődnek, így az áramerősség korlátozható. Amint a kondenzátorok feltöltődnek, a terhelés közvetlenül az áramforráshoz csatlakozik, anélkül, hogy ellenállások lennének közöttük.
A hálózati kapcsoló mellett közvetlenül elhelyeztünk egy DC/DC átalakítót is a nyomtatott áramköri lapra. Ez a fő számítóegységünkhöz, az Intel NUC-hoz csatlakozik, amely más feszültséget igényel.
A PCB azonban nem csak a tápellátásért felelős, hanem egy mikrokontroller egységet is tartalmaz. Ez különböző érzékelők kommunikációjáért felelős, illetve vezérli a tápkapcsolót.
UI PCB
A mikrokontroller egy egyszerű, másik PCB segítségével vezérli az UI panelt is, amely összekapcsolja a LED-eket és a különböző gombokat a robot tetején.

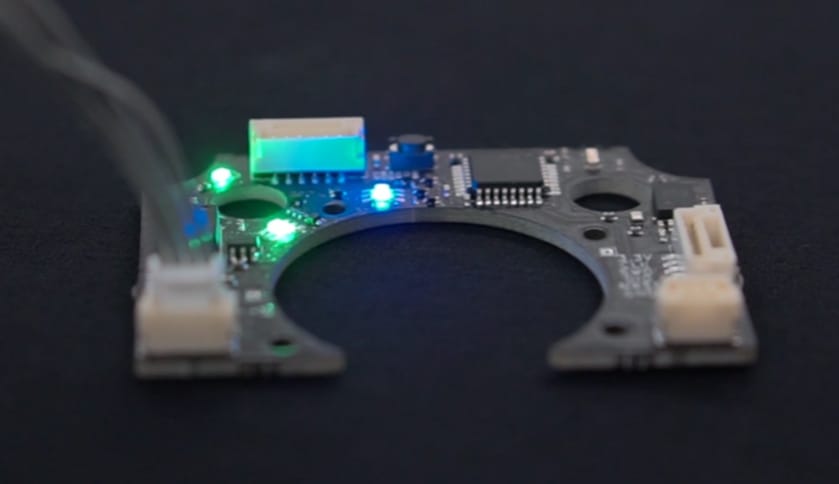
Foot PCB
Ezek a legutóbbi nyomtatott áramköri lapok, amelyeket az Eurocircuits gyártott részünkre. Mind a négy nyomtatott áramköri lapnak el kell férnie egy lábon, amely rendkívül kis méretet, és apró alkatrészeket kíván. A Foot PCB nagyon fontos az egész rendszer szempontjából, mivel ezek vezérlik a mágneseinket. Ebbe a kis nyomtatott áramköri lapba egy kis mikrokontrollert és egy IMU-t is integráltunk. Két RGB LED mutatja a mágnesek állapotát és a láb gyorsulását, amelyet az IMU-val mérünk.
![]()
További információkért látogasson el a magnecko weboldalára!
A csapat által írt eredeti, angol nyelvű blogbejegyzés az Eurocircuits.com oldalán olvasható ide kattintva.
Értesüljön legfrissebb híreinkről elsőként! Kövessen minket!










