

Az ETH Zürich, a ZHAW és a ZHDK egyetemek diákcsapata hat harmadéves gépészmérnök, három rendszermérnök, két ipari tervező és egy villamosmérnök hallgatóból áll. Az elmúlt két félév során LEVA nevű teherrobotunk fejlesztésén dolgoztunk, amely képes rakományokat szállítani, egyenetlen terepen navigálni, sőt lépcsőzni is.

A szállítási ágazatban és az építőiparban gyakoriak a hátsérülések, amelyek az Egyesült Államokban a munkavállalói kártérítési igények és a foglalkozási rokkantság első számú okai. A LEVA célja ezek megelőzése a fejlett robotika munkahelyeken történő alkalmazásával.
Robotunkat egy LiDAR-érzékelővel és két kamerával szereltük fel a navigációhoz, valamint négy kompakt kamerát integráltunk a rakományok követésére. Jelenleg a LEVA-t építőipari használatra fejlesztjük.

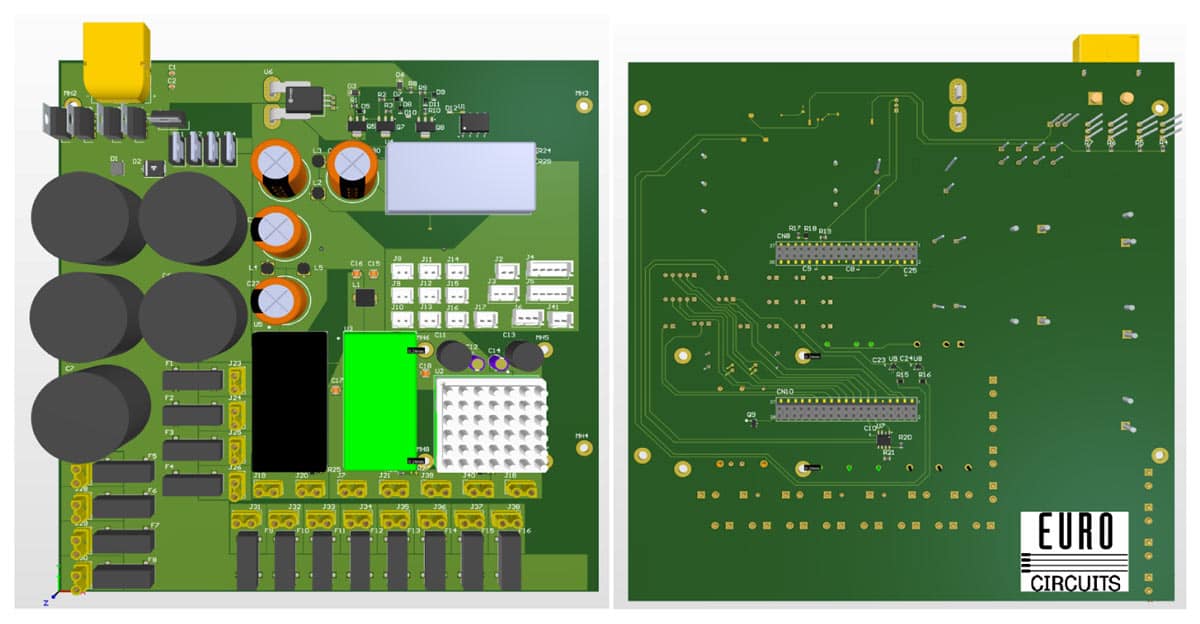
A biztonságos működés érdekében az elektromos rendszerünknek elegendő energiát kell biztosítania mind a tizenhat motor számára. Ennek érdekében olyan áramelosztó táblát terveztünk, amely motoronként akár 20A-t is képes biztosítani. A PCB egy mikrokontrollert (Micro Controller Unit – MCU) és egy CAN kommunikációs interfészt is tartalmaz, amelyek lehetővé teszik a robot mozgásvezérlő egységgel történő kommunikációját. Az Eurocircuits támogatásának köszönhetően pedig kiváló minőségű és kompakt nyomtatott áramköri lapokat tudunk gyártani.
![]()
További információkért látogasson el a LEVA weboldalára.
A csapat által írt eredeti, angol nyelvű blogbejegyzés az Eurocircuits.com oldalán olvasható ide kattintva.
Értesüljön legfrissebb híreinkről elsőként! Kövessen minket!










